
뷰런테크놀로지(이하 뷰런)가 서울시 은평구에서 라이다(LiDAR) 기반의 교통 및 보행자 분석 실증 프로젝트를 성공적으로 완료했다고 27일 밝혔다.
이번 실증은 도심 내 교통량 및 보행자 통행량을 실시간으로 감지하고 정량화할 수 있는 기술의 정확도를 검증하는 데 초점을 맞췄다.
실증 사업은 은평구 와산교 일대를 중심으로 진행되었으며, 교량 위 차량 교통량과 교량 아래 보행자 및 자전거 통행량을 각각 분석하는 방식으로 이뤄졌다. 교량 위 차량 통행량은 라이다 센서로 실시간 측정되었으며, 차량, 상용차, 이륜차 등 유형별 감지와 수량 측정이 안정적으로 이뤄졌다. 이를 통해 도심 교통 데이터 기반 행정 정책 수립이나 흐름 모니터링을 위한 기초 데이터 확보 수단으로의 활용 가능성을 확인했다.
교량 아래에서는 보행자 및 자전거 이용자의 이동을 감지해 실시간 통행량을 분석했다. 라이다 센서는 날씨나 조도 변화에 영향을 받지 않는 환경 강인성을 갖추고 있어 야간 등 저조도 환경에서도 정확한 감지가 가능하다. 또한, 개인을 식별하지 않는 익명 기반의 데이터 수집이 가능해 사생활 침해 우려 없이 스마트 인프라에 적용할 수 있다.
이번 실증을 통해 수집된 데이터는 향후 보행자 안전 확보 및 보행 환경 정비에 필요한 기초자료로 활용될 전망이다.
은평구청 임동현 주무관은 “라이다 기술이 도심 내 교통량과 보행 흐름을 실시간으로 정량화할 수 있다는 가능성을 확인한 의미 있는 사례였다”며, “앞으로 교통 및 보행 환경 개선을 위한 정책 수립 과정에서 과학적 데이터가 활용될 것으로 기대된다”고 말했다.
뷰런 김재광 대표는 “이번 실증을 통해 도심 내 다양한 객체를 안정적으로 인식하고, 실시간으로 수량화할 수 있는 기술력을 입증했다”며, “향후 서울시를 비롯한 전국 지자체와 협력해 공공안전, 교통 운영 효율화 등 다양한 분야에서 라이다 기술의 활용 범위를 넓혀가겠다”고 말했다.
뷰런은 이번 프로젝트를 기반으로, 지속가능한 스마트시티 구축을 위한 데이터 기반 기술 개발과 서비스 고도화에 힘쓸 예정이다.
한편, 2019년에 설립된 뷰런은 라이다 기반의 자율주행 및 ADAS 분야에서 선도적인 기술력을 갖춘 스타트업이다. 자율주행 솔루션 ‘뷰원(VueOne)’은 자동차뿐만 아니라 로봇, UAM 등 다양한 무인이동체에 적용되고 있으며, 스마트 인프라 솔루션 ‘뷰투(VueTwo)’는 ITS, 산업안전, 보안 등 다양한 분야에 활용 중이다. 최근 출시한 AI 모델 개발 플랫폼 ‘뷰엑스(VueX)’는 기존 고객뿐 아니라 신규 수요처에서도 주목받고 있다.

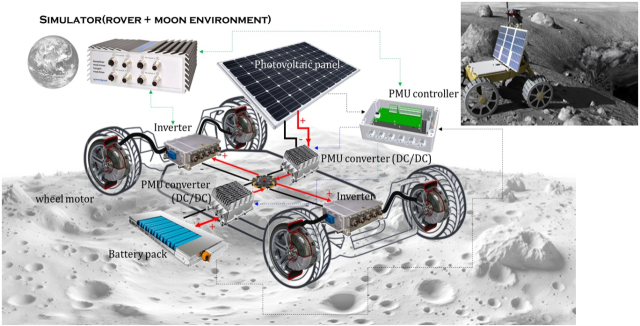


![[포토] 폐광에서 달 탐사 실증한다](https://img.etnews.com/news/article/2025/03/29/news-p.v1.20250329.7f27f4fd996f4927b13f797a30203921_P1.jpg)
