4편의 정규논문과 2편의 워크숍 논문 발표
다양한 환경 속 안정적인 자율주행과 인식기술 구현 초첨

인하대학교는 최근 조영근 전기전자공학부 교수가 이끄는 연구팀이 세계 최고 권위 로보틱스 학술대회인 ‘IEEE ICRA (International Conference on Robotics and Automation) 2025’에서 우수한 학문 성과를 인정받았다고 밝혔다.
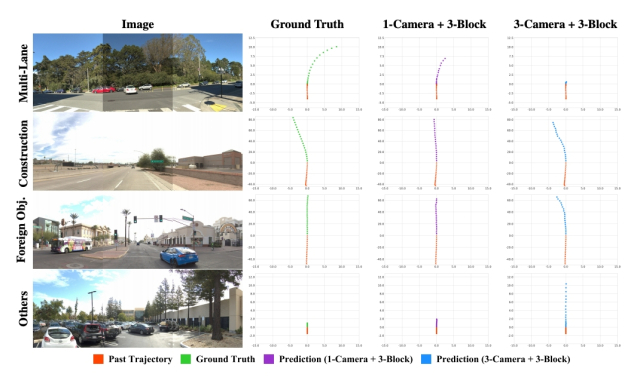
조 교수가 이끄는 공간지능 및 로보틱스 연구실은 ICRA 2025에서 4편의 정규논문과 2편의 워크숍 논문을 발표했다. 연구실의 이번 성과는 다양한 환경에서 안정적인 자율주행과 인식기술을 구현하기 위한 자료·알고리즘 개발에 초점을 맞췄다.
‘DiTer++: 다중 세션 환경에서 다중 로봇 SLAM을 위한 다양한 지형 및 다중 모달 데이터셋 연구’(저자 김주원·김호균·정석환·신영식· 조영근)는 다양한 지형과 센서 정보를 활용, 다중 4족보행 로봇 SLAM을 수행할 수 있도록 설계된 고도화한 데이터셋을 제안했다.
복합 환경에서의 정밀 자율주행 가능성을 한층 높였으며, 한국기계연구원 신영식 박사와 협업해 고정밀 측량급 LiDAR 지도와 위치 정보를 제공한다는 특징이 있다.
‘PoLaRIS 데이터셋: 포항 운하에서의 해상 객체 탐지 및 추적 데이터셋’ 연구(저자 최지원·조동진·이기현·김호균·양건모·김주완·조영근)는 국내 해상환경인 포항 운하에서 획득한 객체 검출·추적용 데이터셋을 공개, 해양 로봇 분야의 연구 개발에 중요한 기반 자료를 제공했다.
기존 카이스트가 공개한 포항 운하 데이터셋을 확장한 결과로, 삼성중공업 김주완 박사와 협업으로 진행됐다. 시야가 제한된 LiDAR 환경에서 장소 인식을 위한 경량 전역 기술자를 제안한 SOLiD로 시야각을 좁혀라: 제한된 시야각(FOV)의 LiDAR 장소 인식을 위한 공간적으로 조직되고, 경량화한 글로벌 디스크립터 연구(저자 김호균·최지원·심태후·김기섭·조영근)는 자율주행 로봇의 정확도와 효율성을 동시에 높이는 방법을 제시했다. 네이버랩스 김기섭 박사(현 DGIST 로봇공학과)와 협업으로 연구가 진행됐다.
마지막으로 ReFeree: 특징과 자유 공간을 활용한 레이더 기반 경량·강건 위치 추정 기법 연구(저자 김호균·최병희·최은철·조영근)는 특성 지도와 자유 공간 정보를 동시에 활용해 레이더 기반의 경량·견고한 위치인식 방법을 제시함으로써, 복잡한 주행 환경에서의 안전성을 높이는 데 기여했다.
4편의 정규논문 중 2편은 IEEE ICRA 2025 학술대회에서, 2편의 경우 IEEE RAL(IEEE Robotics and Automation Letters)에서 발표 자격을 얻어 더욱 주목을 받았다.
조 교수는 “다양한 파트너 기관들과의 협업과 연구원들의 적극적인 참여가 있었기에 이번 성과를 거둘 수 있었다”며 “앞으로 로보틱스와 자율주행 기술 발전에 기여할 수 있도록 지속적인 노력을 이어가겠다”고 소감을 밝혔다.
이번 연구 결과는 4단계 BK21 사업과 정보통신기획평가원의 사람 중심 인공지능 핵심 원천기술 개발사업의 지원으로 수행됐다.
[전국매일신문] 인천/ 정원근기자
wk-ok@jeonmae.co.kr
저작권자 © 전국매일신문 - 전국의 생생한 뉴스를 ‘한눈에’ 무단전재 및 재배포 금지