자율주행 소프트웨어 스타트업 라이드플럭스가 세계 인공지능(AI) 학회인 ‘CVPR 2025’ 자율주행에서 열린 자율주행 챌린지에서 입상했다고 13일 밝혔다.
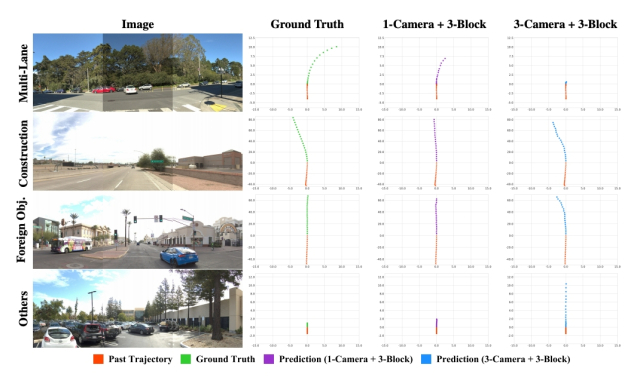
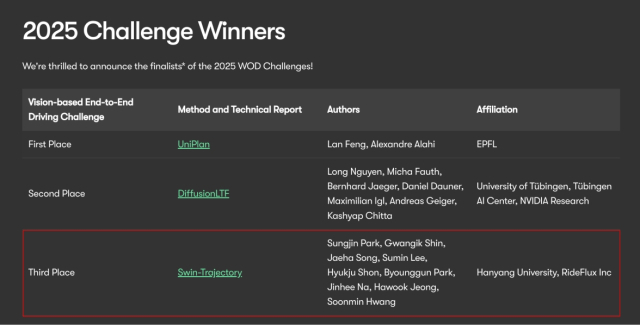
라이드플럭스는 웨이모 오픈 데이터셋 챌린지 비전 기반 엔드투엔드(E2E) 자율주행 부문 3위에 올랐다. 엔비디아, 샤오미, 스위스 로잔연방공대, 캐나다 밀라(MILA) 인공지능(AI) 연구소 등 전세계 29개 자율주행 연구개발팀과 경쟁해 입상했다. 이번 챌린지에 한양대학교 IRCV 연구팀과 공동으로 참가해 웨이모가 공개한 카메라 영상 데이터를 기반으로 자율주행차의 이동 경로를 효율적으로 세웠다. 라이드플럭스와 한양대 연구팀이 제안한 ‘스윈-트레젝토리’(Swin-Trajectory) 방법은 AI 기술을 기반으로 구조화된 차량 이력과 이미지의 맥락을 파악해 미래 궤적을 계획하는 알고리즘이다. 이 방법은 시공간 모델링을 바탕으로 정확도가 높고 실시간 연산속도도 빠르다는 평가를 받는다.
박중희 라이드플럭스 대표는 “(CVPR 2025 챌린지 수상이) 순수 국내 기술의 경쟁력을 다시금 확인할 수 있는 기회였다”며 “앞으로도 다양한 자율주행 서비스로 얻은 양질의 데이터를 기반으로 연구개발(R&D) 역량을 지속적으로 강화해 가장 믿을 수 있는 자율주행을 완성하겠다”고 말했다.
황순민 한양대학교 미래자동차공학과 교수는 “이번 수상은 학생들의 헌신적인 노력과 실력을 입증한 결과이자 라이드플럭스와의 긴밀한 협업을 통해 이룬 산학 협력의 모범 사례”라며 “자율주행 분야에서 국내 기술의 잠재력을 보여줄 수 있어 뜻깊다”고 전했다.






![양자컴 낙관론자 된 젠슨 황…“양자·GPU 통합” [김윤수의 퀀텀점프]](https://newsimg.sedaily.com/2025/06/14/2GU2K607YU_1.jpg)
